Plánování pohybu objektu ve 3D prostoru – diplomová práce
Abstrakt
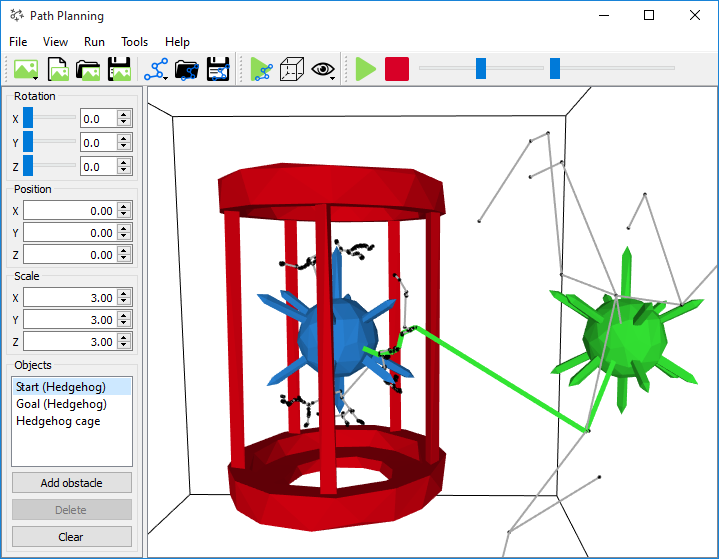
Tato práce se zabývá problémem plánování pohybu objektu ve 3D prostoru. Cílem je vytvořit program, který uživateli umožní vytvořit scénu, ve které bude hledání cesty probíhat, automaticky pak cestu vyhledá a nakonec ji bude vizualizovat. Práce je zaměřena na pravděpodobnostní algoritmy, které jsou spolu s důležitými pojmy popsány v teoretické části. V praktické části je popsán návrh a implementace aplikace. Nakonec je provedeno několik experimentů pro porovnání výkonu jednotlivých algoritmů a demonstraci funkčnosti programu. [červen 2016]
Ocenění
Konference Excel@FIT 2016:Soubory